S550 Hexacopter
Learning to build drones with global positioning and advanced peripherals.

In the summer of 2023, my work on some large drone prototypes at a startup inspired me to build my own hexacopter as a learning tool.
I started by acquiring an S550 hexacopter airframe with some cheap motors and ESCs to go along with it. To mirror the startup’s flight electronics suite, I used a Pixhawk 6X flight controller running the PX4 software stack, an M8N GPS module, a SIYI datalink air unit and ground controller (later replaced with a Herelink Black), a SIYI A8 Mini PWM actuated gimbal camera, and a SiK telemetry radio for control redundancy.
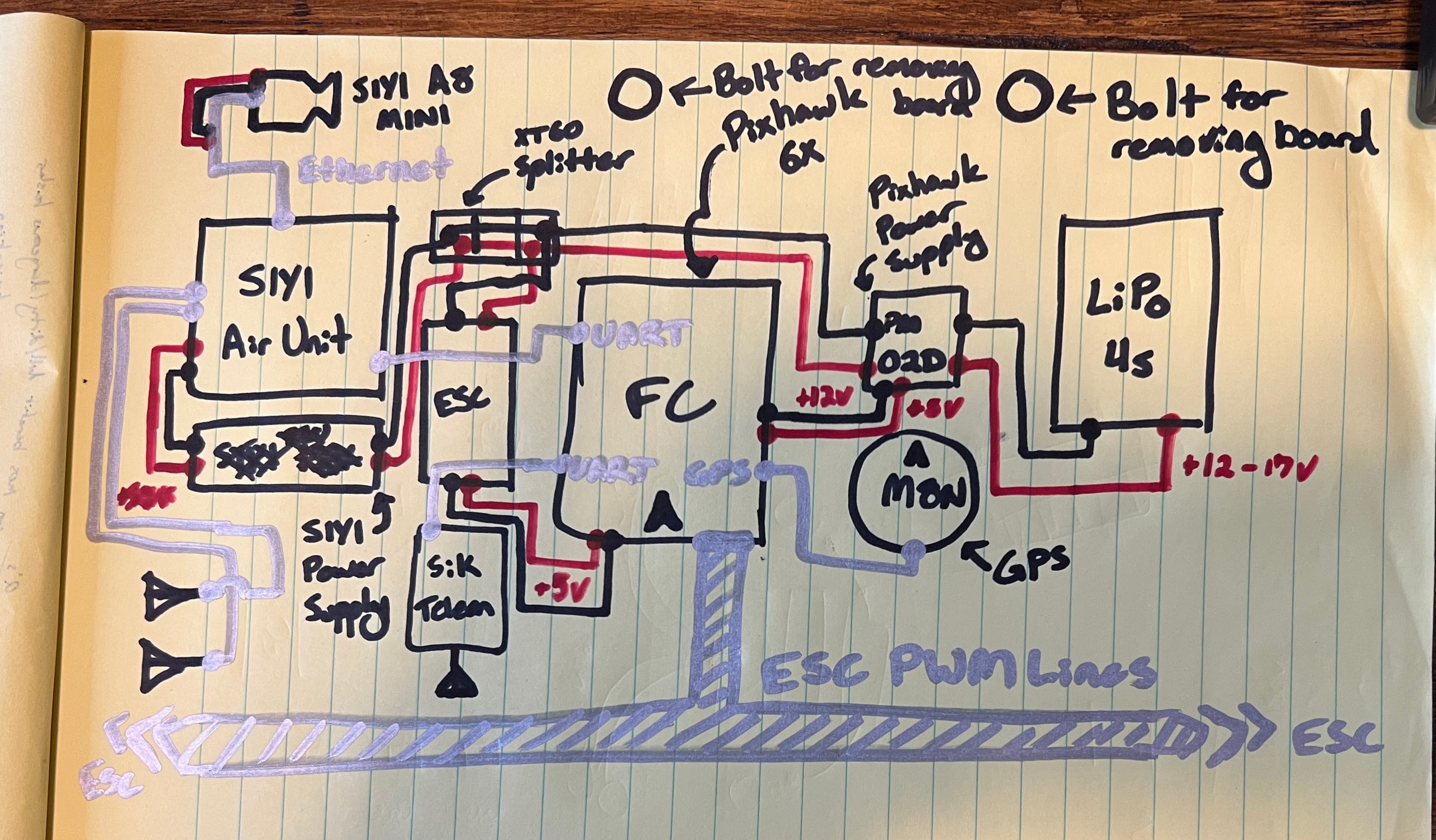 The complete wiring diagram for the system, hastily scribbled on notebook paper.
The complete wiring diagram for the system, hastily scribbled on notebook paper.
The whole journey involved assembling the drone, configuring the PX4 firmware to interface with each peripheral, fine-tuning its flight characteristics for stable flight, and configuring the TCP/IP based downlink for both MAVLink telemetry and RTSP video so that it was compatible with our startup’s in-house software.
The end product was a solid hexacopter drone with autonomous flight capability, MAVLink compatibility, and an excellent platform to develop future vehicles on.